
The Robot Perception Lab performs research related to localization, mapping and state estimation for autonomous mobile robots. The lab was founded in 2014 by Prof. Michael Kaess. The lab is part of the Robotics Institute at Carnegie Mellon University and belongs to both the Field Robotics Center and the Computer Vision Group.
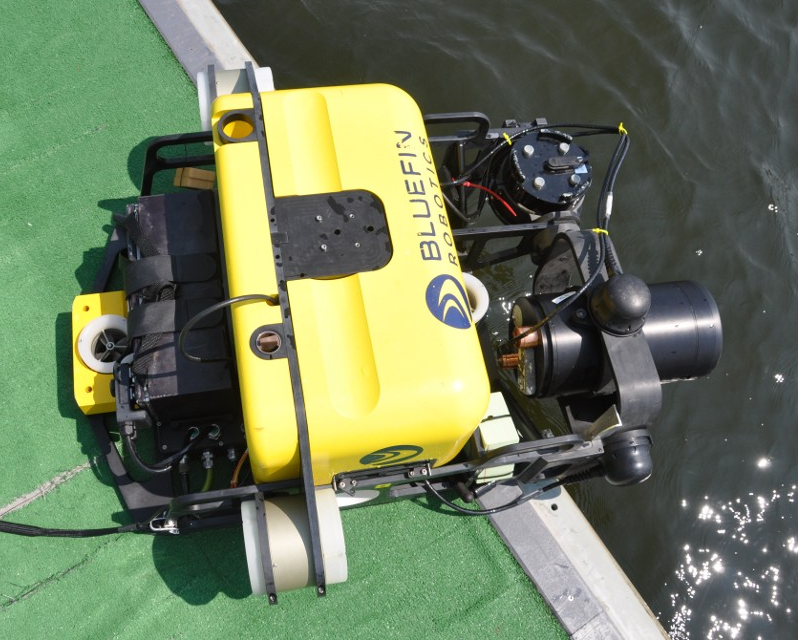
Applications of our research span a wide range from underwater robots to aerial robots and handheld systems for mapping.

Group photos from left to right: 2022, 2020, 2019, 2018, 2016



Highlights
- Suddhu’s Science Robotics paper is published: Neural feels with neural fields: Visuo-tactile perception for in-hand manipulation.
- Joe’s RA-L paper got accepted: NormalFlow: Fast, robust, and accurate contact-based object 6DoF pose tracking with vision-based tactile sensors.
- Easton’s RA-L paper got accepted: Robust preintegrated wheel odometry for off-road autonomous ground vehicles.
- Easton’s IEEE Journal of Oceanic Engineering paper appeared: HoloOcean: A full-features marine robotics simulator for perception and autonomy.
- Mohamad co-authored a PAMI paper that was accepted: [Z-splat: Z-axis Gaussian splatting for camera-sonar fusion].
- We have presented 3 papers at IROS 2024 in Abu Dhabi, UAE: vision-based cross-view vehicle registration in off-road GPS-denied environments, cross-view localization and matching via birds-eye-view synthesis, and incremental nonparametric inference in high dimensional state spaces.
- Mohamad presented his paper on neural rendering for acoustic-optical sensor fusion at SIGGRAPH 2024 in Denver, CO.
- Dan presented his paper on incremental distributed optimization at RSS 2024 in Delft, Netherlands.
- Dan’s paper on asynchronous distributed smoothing and mapping was a finalist for Best Multi-Robot Systems Paper at ICRA 2024.
- We have presented 4 papers at ICRA 2024 in Yokohama, Japan: asynchronous distributed smoothing and mapping, learning covariances for estimation with constrained bilevel optimization, multi-radar inertial odometry and sonar image correspondence.
- Allie presented her paper on neural readiance field with lidar maps at ICCV 2023 in Paris, France.
- We have presented 4 papers at ICRA 2023: robust incremental smoothing and mapping (riSAM), neural implicit surface reconstruction using imaging sonar, sonar image filtering for occupancy mapping and bundle adjustment for coplanar points and lines.
- Wei’s PAMI paper has been accepted: ASH: A Modern Framework for Parallel Spatial Hashing in 3D Perception.
- We have presented 6 papers at IROS 2022: Incremental Constrained Optimization using the Bayes Tree, Acoustic Localization with MEMS Microphones, HoloOcean: Realistic Sonar Simulation, Depth Estimation for 3D Imaging Radar, Group-k Consistent Measurement Set Maximization, LiDAR SLAM with Planes, Lines and Cylinders (published in RA-L).
- Congratulations to Lipu for receiving the Outstanding Navigation Paper Award at ICRA 2022 for direct point-line visual odometry!
- We have presented 6 papers at ICRA 2022: GPS-denied ground vehicle localization, Shape mapping through dense touch and vision, In-hand tactile tracking with learned surface normals, HoloOcean underwater robotics simulator, Direct point-line visual odometry, Information-theoretic multi-camera extrinsics calibration (published in RA-L).
- Allie has presented her visual map sparsification work at CVPR 2022.
- Congratulations to Yehonathan and Dan for receiving NSF Graduate Research Fellowships!
- Paloma’s CoRL paper learns energy-based models in factor graphs, avoiding the need for differentiable optimizers.
- Alex’ paper on localizing ground penetrating radar was one of five finalists for the IROS 2021 best paper and best student paper.
- We have presented 4 papers at IROS 2021: Map compression for LiDAR registration, Localizing ground penetrating radar, LiDAR SLAM with plane adjustment (published in RA-L), and Direct point-line monocular visual odometry (published in RA-L).
- Suddhu’s paper on tactile SLAM was one of four finalists for the ICRA 2021 best service robotics paper.
- We have presented 7 papers at ICRA 2021: Learning tactile models for factor graph, Tactile SLAM, Compositional object SLAM, Compressed 3D map for monocular registration, Joint instance segmentation of point clouds and images, LiDAR smoothing and mapping with planes, and Perspective n-Line solution (published in RA-L).
- We have presented 5 papers at IROS 2020: Ambiguity-aware robust active SLAM, Efficient multiresolution scrolling grid, Efficient trajectory library filtering, Fermat paths for imaging sonar reconstruction, and Multi-stereo visual-inertial odometry.
- Our camera-lidar extrinsic calibration from IROS 2018 has been incorporated into Matlab.
- We have presented 5 papers at ICRA 2020: Active underwater SLAM, Incremental constrained smoothing, Volumetric albedo 3D reconstruction from imaging sonar, Fast pose estimation from 3D correspondences, and Unsupervised learning of monocular depth (published in RA-L).
- Frank Dellaert and Michael Kaess received the Inaugural RSS 2020 Test of Time Award "For pioneering an information smoothing approach to the SLAM problem via square root factorization, its interpretation as a graphical model, and the widely-used GTSAM free software repository."
- We have presented 6 papers at IROS 2019 in Macao: Consistent occupancy grid maps for planning, Robust scene reconstruction, Wide-aperature imaging sonar reconstruction, Dense sonar-based underwater reconstruction, Degeneracy-aware factors, Efficient perspective-n-point solution.
- We have presented 5 papers at ICRA 2019 in Montreal, Canada: Joint surface reconstruction from vision and LiDAR, Globally and locally consistent RGB-D reconstruction, Multi-hypothesis iSAM, Physics-based multi-view reconstruction of wires, and Through-water AUV localization (published in RAL).
- Jerry’s paper on information sparsification in visual-inertial odometry was one of six finalists for the IROS 2018 best conference paper.
- New RI seminar on factor graphs in robot perception.
- We have presented 4 papers at IROS 2018 in Madrid, Spain: Virtual occupancy grid maps, multi-beam sonar processing, information sparsification in visual-inertial odometry, and lidar-camera calibration.
- We have presented 3 papers at ICRA 2018 in Brisbane, Australia: Dense planar-inertial SLAM with structural constraints, feature-based SLAM for imaging sonar, and pose-graph SLAM using forward looking sonar (also in RA-L).
- Our GravityFusion work appeared at IROS 2017 in Vancouver.
- Our new water tank is now in operation.
- At IROS 2017 we have co-organized a workshop on Lines, Planes, Manhattan Models for 3D Mapping and presented our work on GravityFusion.
- We have published an extended article on Factor Graphs for Robot Perception.
- We have presented 4 publications at ICRA 2017 in Singapore: Keyframe-based dense planar SLAM, manifold particle filter for state estimation under contact, robust stereo matching, and direct visual odometry using binary descriptors
- We have presented 5 publications at IROS 2016 in Daejeon, South Korea: GPS-denied long distance flight, inference with multimodal posteriors, data association for ASFM, underwater mapping, and monocular planar mapping.
{kind=link}