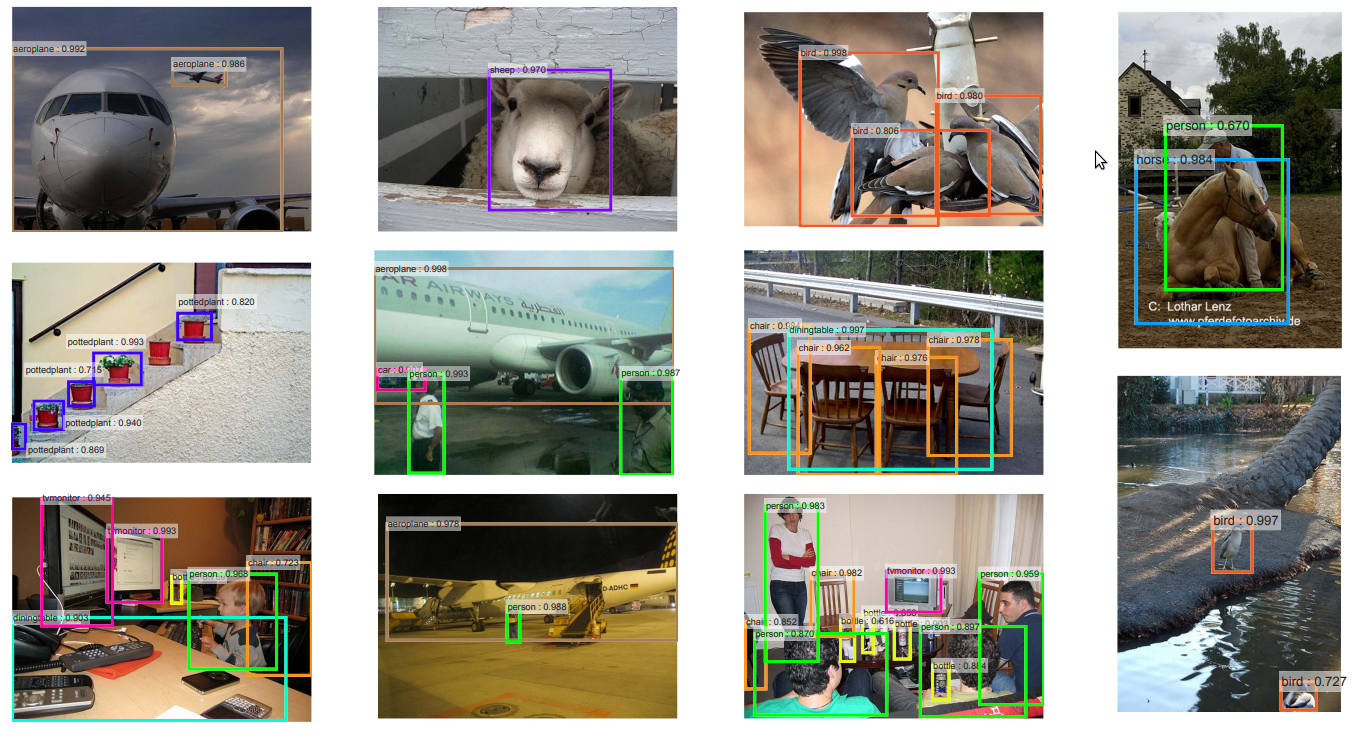
Typical detector output: bounding boxes and class label scores
CNNs rapidly improving in accuracy and speed
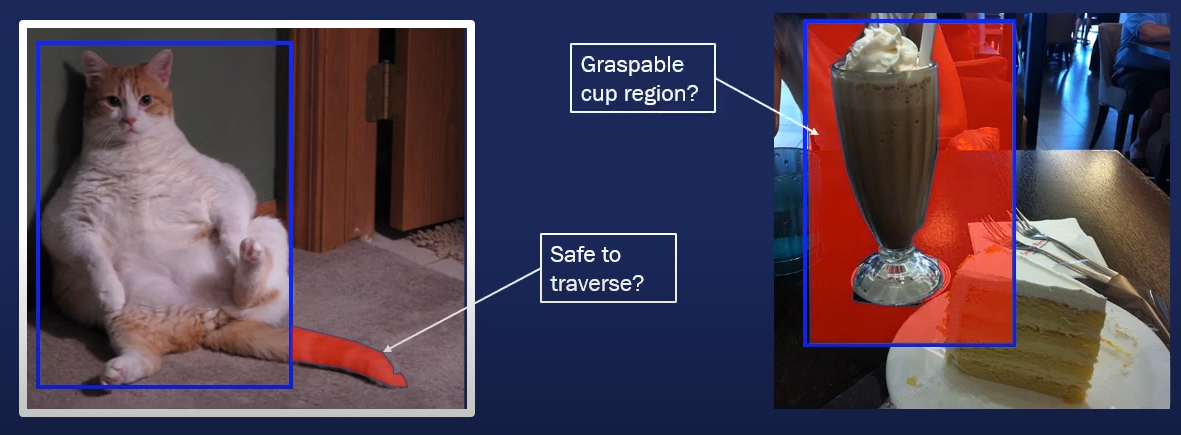
Spatial and semantic uncertainty not typically provided
3.3. Uncertainty Estimation in Object Detection
Semantic Segmentation of Small Objects and Modeling of Uncertainty in Urban
Remote Sensing Images Using Deep Convolutional Neural Networks (Kampffmeyer, 2016)
Monte Carlo dropout approximates Bayesian inference
Pixel-wise classification uncertainty for semantic labels
Bayesian SegNet: Model Uncertainty in Deep Convolutional Encoder-Decoder Architectures for Scene Understanding (Kendall, 2017)
Bayesian model outputs pixel-wise semantic segmentation with model uncertainty per class
What Uncertainties Do We Need in Bayesian Deep
Learning for Computer Vision? (Kendall and Gal, 2017)
Examine aleatoric (observation) and epistemic (model) uncertainty
Evaluating Merging Strategies for Sampling-based Uncertainty
Techniques in Object Detection (Miller, 2019)
Estimate spatial and classification uncertainties for object detection
Use uncertainty to accept/reject detections in near open-set conditions
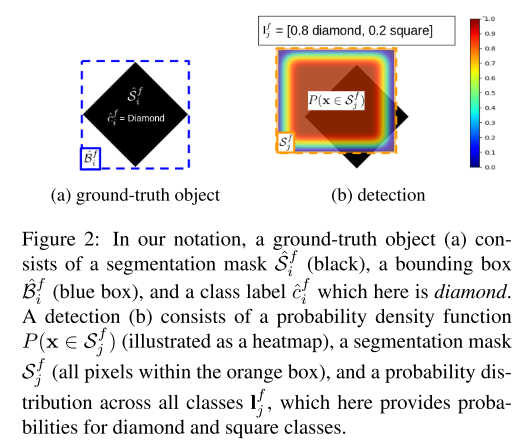
4. Probabilistic Object Detection
Object detection consists of:
Probability distribution over known labels
Bounding box: Gaussian distributions for corner positions
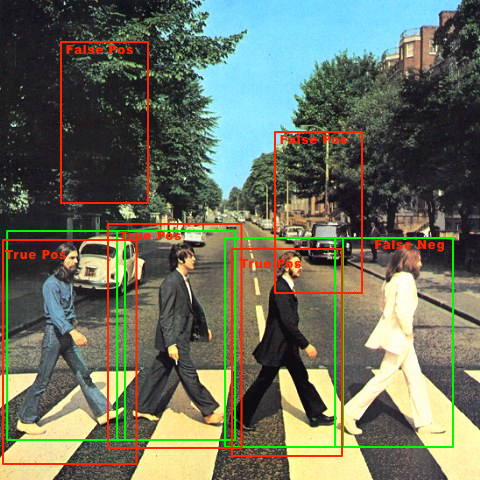
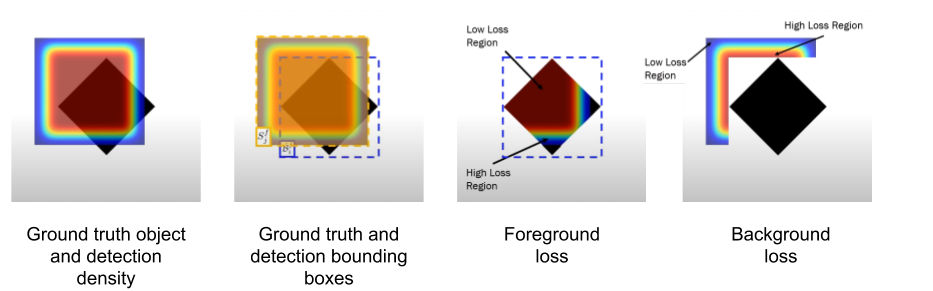
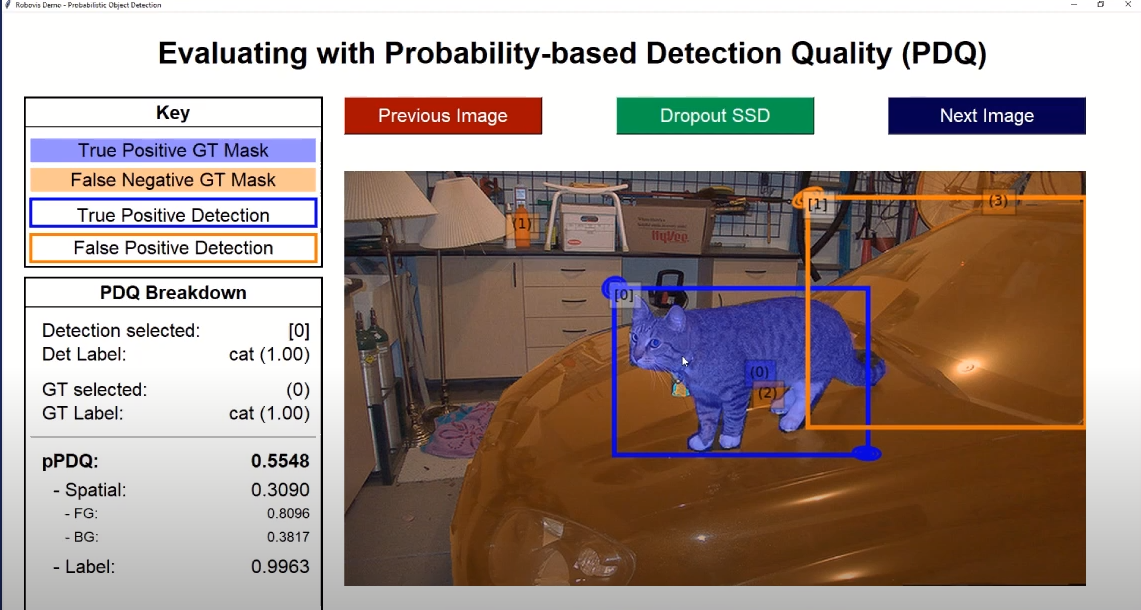
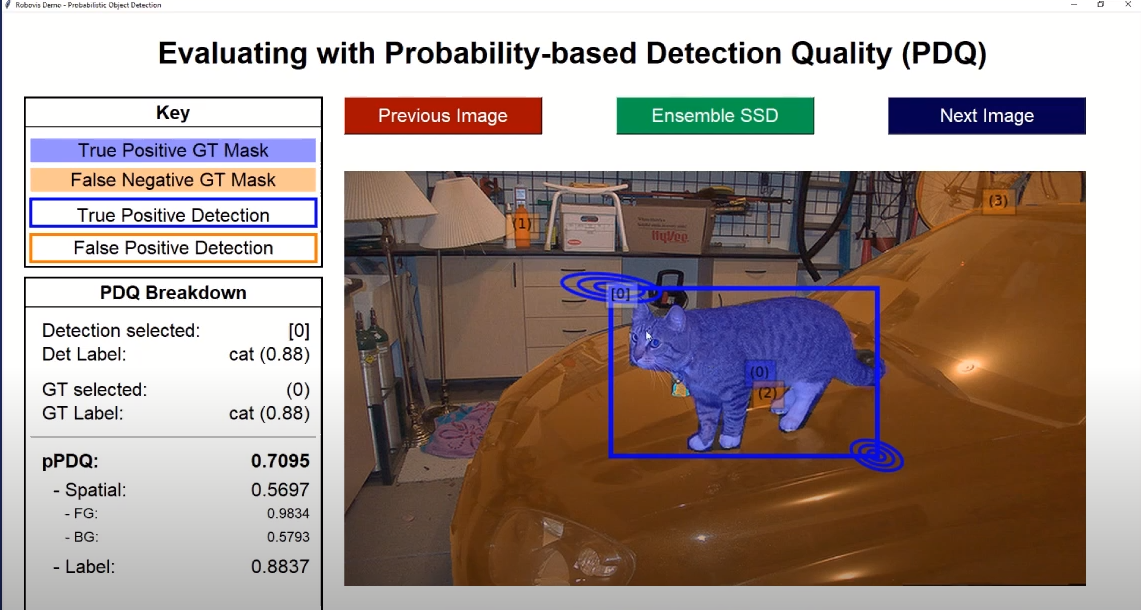
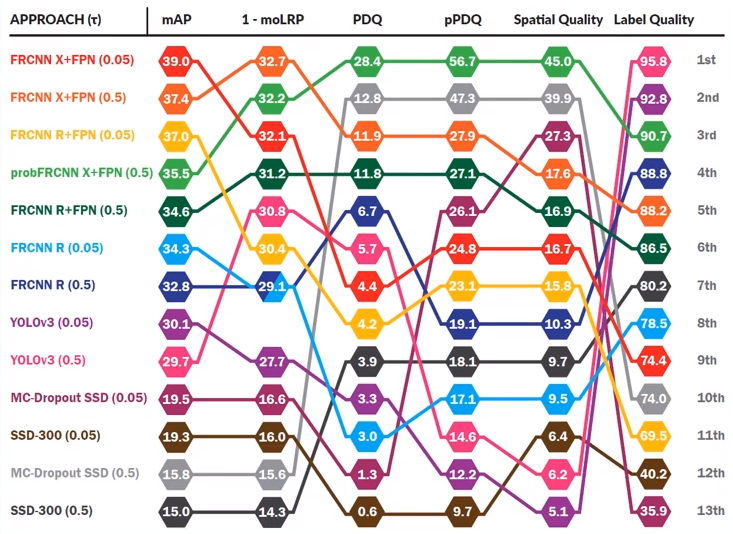
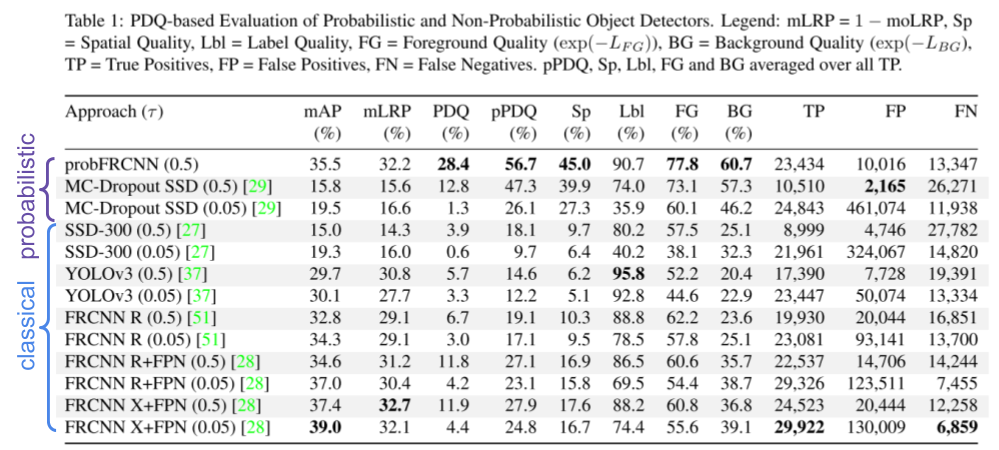
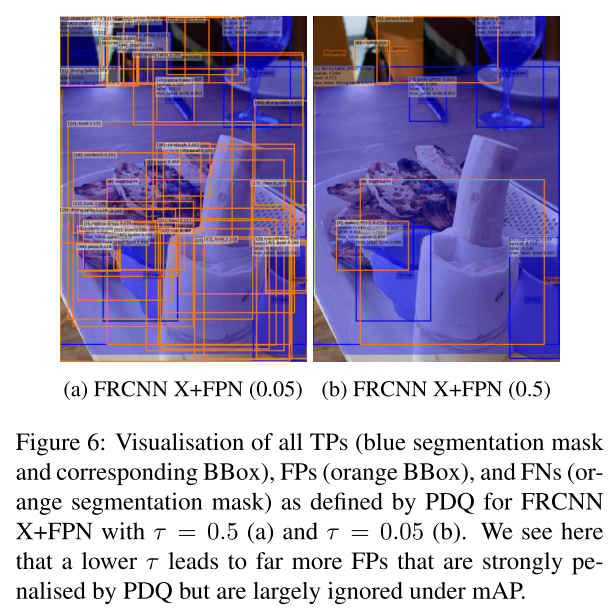
5. Probability-based Detection Quality (PDQ)
Frame f, evaluate detections Djf with ground truth objects Gif
Foreground Loss LFG
Background Loss LBG
Spatial Quality QS
Label Quality QL
Pairwise PDQ pPDQ
PDQ Score pPDQ
qf(i) is pPDQ for detection and ground truth object associated by Hungarian matching